For Offersssss! (机器学习篇)
不重复造轮子了,直接放链接学习……相关描述为直接转载
模型评估
性能度量
准确率(查准率)
所有 预测为正例 的样本中 真正例的占比,**查准率**,$$Precision=\frac{TP}{TP+FP}$$
召回率(查全率)
所有 实际为正例 的样本中 真正例的占比,**查全率**,$$Recall=\frac{TP}{TP+FN}$$
F-score
基于查全率和查准率的 调和平均,$$\frac{1}{F1}=\frac{1}{2}(\frac{1}{P}+\frac{1}{R}) \Rightarrow F1=\frac{2 \times P \times R}{P+R}$$
真正例率
正样本中预测为正例(预测对的正样本)的占比,$$TPR=\frac{TP}{TP+FN}=Recall$$
假正例率
负样本中预测为正例(预测错的正样本)的占比,$$FPR=\frac{FP}{TN+FP}$$
P-R曲线与ROC曲线的区别
P-R曲线与ROC曲线的区别与选择
(1)应用场景
ROC曲线:一般用于分类的场景,二分类多分类皆可。比如我们的测试集右正样本和负样本,通过测试就可以得到TPR和FPR。
P-R曲线:一般用于目标检测领域。通过我们前面的介绍,可以看到precision表示预测为正例中有多少是真正的正例,即表示出了预测的准不准。在目标检测领域,例如典型的飞机、船检测,都是从图像中检测出上述目标,那么不可避免的就会有背景(FP)出现,进而可以计算precision。一个好的目标检测模型,P-R曲线下的面积(AUC)越大。
(2)正负样本不均衡下的鲁棒性
ROC曲线:正负样本不均衡下更稳定。在实际的数据集中经常会出现类不平衡(class imbalance)现象,即负样本比正样本多很多(或者相反),而且测试数据中的正负样本的分布也可能随着时间变化。例如当负样本增加时,TPR是不变的,根据下式可知,FP同在分子和分母,则变化也不大,因此ROC的曲线变化不大。
P-R曲线:受到正负样本分布影响较大。仍以上面的例子为例,当负样本增加时,recall是不变的,根据下式可知,FP在分母,则precision会明显的降低。
总结:
(1)一般的分类任务,采用ROC曲线;
(2)当正负样本比例失调时,则ROC曲线变化不大,此时用PR曲线更加能反映出分类器性能的好坏。
模型检验方法
(1)Holdout
(2)K-Fold
(3)自助法
线性模型
Logistic回归
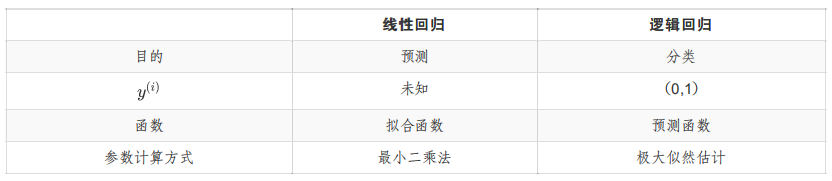
(1)逻辑回归和线性回归的区别?
解析:
(2)逻辑回归为什么选择对数损失函数?
解析:为了优化过程中得到的是全局最优解,一般要求逻辑回归的损失函数为凸函数,而相比于平方损失,对数函数的二阶导恒大于 $0$(可严格 证明)。
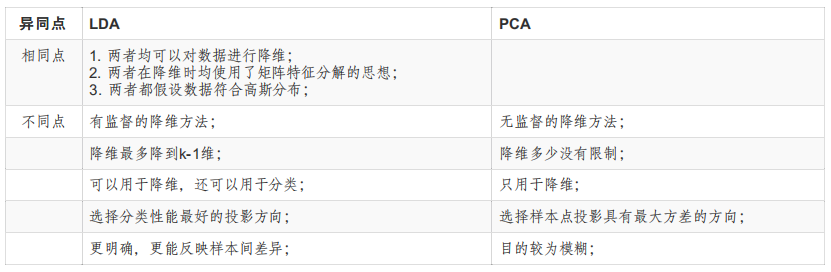
线性判别分析(LDA)
Linear Discriminant Analysis, LDA
通俗易懂的描述:采用 “投影后类内方差最小,类间方差最大” 的思想将高维空间的数据 降一维 投影到一条直线上(或超平面)。
与
PCA降维的区别
优化方法
凸函数
梯度下降法与牛顿法
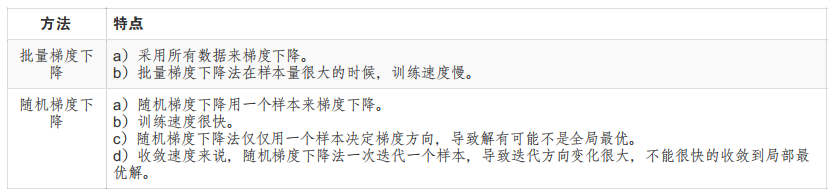
梯度下降的三种方式:批量梯度下降(BGD)、随机梯度下降法(SGD)、小批量梯度下降(MBGD)
梯度下降法与牛顿法的对比
(1)牛顿法:是通过求解目标函数的一阶导数为0时的参数,进而求出目标函数最小值时的参数。
优点:收敛速度很快。海森矩阵的逆在迭代过程中不断减小,可以起到逐步减小步长的效果。
缺点:海森矩阵的逆计算复杂,代价比较大,因此有了拟牛顿法(拟牛顿法)。
(2)梯度下降法:是通过梯度方向和步长,直接求解目标函数的最小值时的参数。
越接近最优值时,步长应该不断减小,否则会在最优值附近来回震荡。
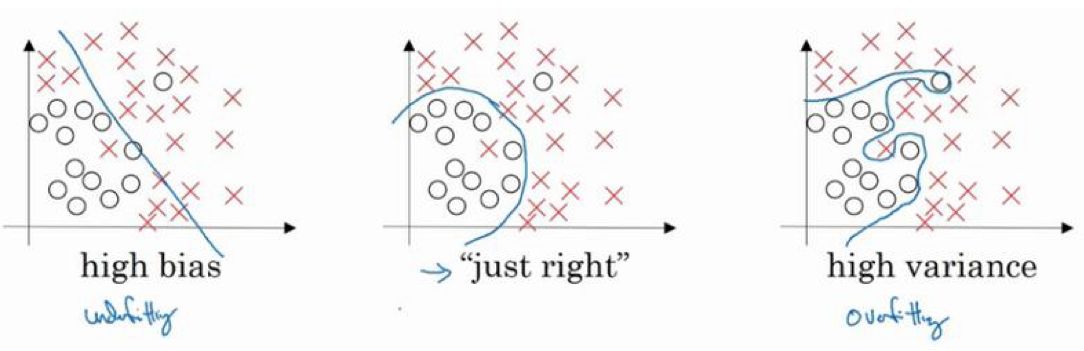
欠拟合(高偏差)和过拟合(高方差)
以下搬运自:入坑机器学习:六,逻辑回归
从左至右为:
(1)线性模型,欠拟合,不能很好地适应我们的训练集;
(2)似乎最合适;
(3)四次方的模型,过于强调拟合原始数据,而丢失了算法的本质:预测新数据。可以看出,若给出一个新的值使之预测,它将表现的很差,即过拟合。
如何处理过拟合问题?
(1)特征选择。丢弃一些不能帮助我们正确预测的特征。可以是手工选择保留哪些特征,或者使用一 些模型选择的算法来帮忙(例如 PCA);
(2)正则化。保留所有的特征,但是减少参数的大小(Magnitude,指参数的数值大小)。高次项导致了过拟合的产生,使高次项的系数接近于 0 即可。
代价函数
常见的代价函数(以逻辑回归为例):
均方误差 MSE:$J(\theta)=\frac{1}{2m}[\sum_{i=1}^{m}(h_{\theta}(x^{(i)})-y^{(i)})^{2}+\lambda\sum_{j=1}^{m}\theta_{j}^{2}]$
交叉熵 CE:$J(\theta)=\frac{1}{m}\sum_{i=1}^{m}[-y^{(i)}log(h_{\theta}(x^{(i)}))-(1-y^{(i)})log(1-h_{\theta}(x^{(i)}))]+\lambda\sum_{j=1}^{m}\theta_{j}^{2}$
(1)$\lambda$ 称为正则化参数或惩罚系数(同 SVM 中的系数 C),增加 $\lambda\sum_{j=1}^{m}\theta_{j}^{2}$ 一项为什么能减少参数 $\theta$ 的值?
解析:一般情况下,正则化系数 $\lambda$ 的设定值会比较大,$J(\theta)$ 在使得代价最小的过程中只能通过减少 $\theta$ 的值来实现。
(2)为什么代价函数要具有非负性?
解析:保证设计的目标函数有下界,才能确保在优化过程中使其不断减小,直至收敛。
正则化(Regularization)和稀疏性(重点)
什么叫正则化?
正则化,也称规则化,旨在给需要训练的目标函数(作用于模型参数)加上一些规则和限制。
L1和L2的区别
(1)L1是模型各个参数的绝对值之和;L2是模型各个参数的平方和的开方值。
(2)L1会趋向于产生少量的特征,而其他的特征都是0。因为最优的参数值很大概率出现在坐标轴上,这样就会导致某一维的权重为0,产生稀疏权重矩阵。
(3)L2会选择更多的特征,这些特征都会接近于0。最优的参数值很小概率出现在坐标轴上,因此每一维的参数都不会是0。当最小化 $||w||$时,就会使每一项趋近于0。
(4)L1的作用是为了矩阵稀疏化。假设的是模型的参数取值满足拉普拉斯分布。
(5)L2的作用是为了使模型更平滑,得到更好的泛化能力。假设的是参数是满足高斯分布。
Dropout
通过随机删除⽹络中的神经单元,使得模型拟合不依赖于任何⼀个特征;
决策树
ID3,C4.5,CART决策树
贝叶斯分类器
朴素贝叶斯分类器
推导以及假设条件
支持向量机
- 当训练样本线性可分时,通过硬间隔(
hard margin)最⼤化,学习⼀个 线性可分⽀持向量机; - 当训练样本近似线性可分时,通过软间隔(
soft margin)最⼤化,学习⼀个 线性⽀持向量机; - 当训练样本线性不可分时,通过核技巧和软间隔最⼤化,学习⼀个 ⾮线性⽀持向量机;
原问题
样本空间中任意点 $x$ 到超平面 $(w, b)$ 的距离可定义为 $$r=\frac{|w^{T}x+b|}{||w||},$$ 超平面的分类策略为 $$\begin{cases} w^{T}x+b \geq +1, y_{i}=+1; \\ w^{T}x+b \leq -1, y_{i}=-1. \end{cases}$$ 两个异类 支持向量(使得上式取等号的样本点,即$|w^{T}x+b|=1$)到超平面的距离和(即间隔)为 $$margin=\frac{2}{||w||},$$ 优化目标即为 找到一个超平面,使得间隔最大,问题定义为 $$\max_{w,b} \frac{2}{||w||},$$ 等价于 $$\min_{w,b} \frac{1}{2}||w||^{2},$$ $$\text{s.t. } y_{i}(w^{T}x_{i}+b) \ge 1, i=1,2,…,m.$$
对偶问题
SVM 对偶形式的推导,以及 Gurobi 求解对偶形式 SVM
注:优化问题的约束条件一般写成标准形式,即左小右大且右侧为 $0$,因此约束条件转化为 $1-(y_{i}(w^{T}x_{i}+b) \le 0$ 的形式再构造拉格朗日函数。
显然,原问题是一个凸二次规划问题,其拉格朗日函数可以写成:
$$L(w,b,\alpha)=\frac{1}{2}||w||^{2}+\sum_{i=1}^{m}\alpha_{i}(1-(y_{i}(w^{T}x_{i}+b))),$$ 由 $\alpha_{i}(1-(y_{i}(w^{T}x_{i}+b) \le 0$,可知 $L(w,b,\alpha) \le \frac{1}{2}||w||^{2}$,即 拉格朗日函数是原问题的一个下界。
我们要想找到最接近原问题最优值的一个下界,就需要 求出下界的最大值,即 $\max_{\alpha} L(w,b,\alpha)$,则原问题可转化为优化问题: $$\min_{w,b}\max_{\alpha} L(w,b,\alpha),$$ 根据拉格朗日对偶性,原问题(极小极大问题)等价于其对偶问题(极大极小问题): $$\max_{\alpha}\min_{w,b} L(w,b,\alpha).$$
为什么要将原问题转换成对偶问题?
(1)问题求解。$\min_{w,b}\max_{\alpha} L(w,b,\alpha)$ 形式的极小极大问题只能对 $\alpha$ 求导,转化为极大极小问题 $\max_{\alpha}\min_{w,b} L(w,b,\alpha)$ 后才能对求导以求最优解;
(2)降低复杂度。将求特征向量 $w$(复杂度为 $O(d)$)转化为求比例系数 $\alpha$(复杂度为 $O(m)$),其中 $d$ 为样本的维度,$m$ 为样本数量。 关键在于:只有支持向量的比例系数 $\alpha$ 才非 $0$;
(3)约束转换。将不等式约束转换成等式约束;
(4)方便核函数的引入?
对偶变换成立的条件是什么?
解析:KKT条件。KKT条件是原问题与对偶问题等价的必要条件,当原问题是凸优化问题时,变为充要条件。
求解的问题明确了,接下来就是简化问题和推导约束条件的过程,将 $L(w,b,\alpha)$ 分别对 $w$ 和 $b$ 求偏导可得 $$\begin{aligned} \frac{\partial L}{\partial w}&=w-\sum_{i=1}^{m}\alpha_{i}y_{i}x_{i}, \\ \frac{\partial L}{\partial b}&=-\sum_{i=1}^{m}\alpha_{i}y_{i},\end{aligned}$$ 令上述两式为 $0$,可得 $$w=\sum_{i=1}^{m}\alpha_{i}y_{i}x_{i},$$ $$\sum_{i=1}^{m}\alpha_{i}y_{i}=0,\tag{*}$$ 将 $w=\sum_{i=1}^{m}\alpha_{i}y_{i}x_{i}$ 带入拉格朗日函数 $L(w,b,\alpha)$ 中,可得 $$\begin{aligned} L(w,b,\alpha)&=\frac{1}{2}w^{T}w+\sum_{i=1}^{m}\alpha_{i}(1-(y_{i}(w^{T}x_{i}+b))) \\ &=\frac{1}{2}\sum_{i=1}^{n}\sum_{j=1}^{m}\alpha_{i}\alpha_{j}y_{i}y_{j}x_{i}^{T}x_{j}+\sum_{i=1}^{m}\alpha_{i}-\sum_{i=1}^{m}\sum_{j=1}^{m}\alpha_{i}\alpha_{j}y_{i}y_{j}x_{i}^{T}x_{j}-b\sum_{i=1}^{m}\alpha_{i}y_{i} \\ &=\sum_{i=1}^{m}\alpha_{i}-\frac{1}{2}\sum_{i=1}^{n}\sum_{j=1}^{m}\alpha_{i}\alpha_{j}y_{i}y_{j}x_{i}^{T}x_{j}, \end{aligned}$$ 将上述简化后的问题结合 $(*)$ 式的约束即为最后的对偶问题:
$$\max_{\alpha}\sum_{i=1}^{m}\alpha_{i}-\frac{1}{2}\sum_{i=1}^{m}\sum_{j=1}^{m}\alpha_{i}\alpha_{j}y_{i}y_{j}x_{i}^{T}x_{j},$$ $$\begin{aligned} \text{s.t. } &\sum_{i=1}^{m}\alpha_{i}y_{i}=0, \\ &\alpha_{i} \ge 0, i=1,2,…,m. \end{aligned}$$
KKT条件
等式约束问题可按拉格朗日乘数法直接求解。对于不等式约束问题
$$\min f(x)$$ $$\text{s.t. } g(x) \le 0$$
其最优解必然在可行域内部或边界上,设该问题的拉格朗日函数为 $L(x,\lambda)=f(x)+\lambda g(x)$。
(1)当最优解 $x^{*}$ 落在可行域内部,即 $g(x^{*})<0$,此时约束条件 $g(x) \le 0$ 无效,等效于令 $$\begin{cases} \lambda = 0 \\ \nabla_{x} L(x,\lambda)=\nabla f(x)=\frac{\partial f(x)}{\partial x}=0, \end{cases}$$ 即可求得最优解;
(2)当最优解 $x^{*}$ 落在可行域边界,即 $g(x^{*})=0$,此时可视为等式优化问题,同样利用拉格朗日函数求解,令 $$\nabla_{x} L(x,\lambda)=\nabla f(x^{*})+\lambda \nabla g(x^{*}),$$ 可以证明 $\nabla f(x^{*})$ 与 $\nabla g(x^{*})$ 方向必然相反(数学证明未找到),因此必然存在 $\lambda >0$ 使得 $\nabla f(x^{*})+\lambda \nabla g(x^{*})=0$ 有解,该解即为最优解。
整合以上两种情况,必然存在以下条件:
$$\begin{cases} \nabla_{x} L(x,\lambda)=\nabla f(x)+\lambda \nabla g(x)=0 \\ g(x) \le 0 \\ \lambda \ge 0 \\ \lambda g(x) = 0 \end{cases}$$
以上条件合称 KKT 条件,分别为定常方程式、原始可行性、对偶可行性,以及互补松弛性;
由于 SVM 的 原问题为不等式约束问题,其对偶问题必须满足 KKT 条件,即:
$$\begin{cases} \nabla_{x} L(w,b,\alpha)=0 \\ 1-y_{i}(w^{T}x_{i}+b) \le 0 \\ \alpha_{i} \ge 0 \\ \alpha_{i} (1-y_{i}(w^{T}x_{i}+b)) = 0. \end{cases}$$
核函数
为什么引入核函数?
解析:实际数据往往是线性不可分的,通过引入核函数将特征映射到更高维的空间实现分类。
核函数的引入是否大大增加了计算复杂度?
解析:没有。核函数将特征进行低维到高维的转化,但实际上是在低维的空间上计算得到高维空间的效果,不会出现维度爆炸或计算复杂度急剧上升的问题。
核函数的本质?
解析:核函数是一个低维的计算结果,并没有真正实现低维到高维的映射,而是 核函数低维运算的结果等价于映射到高维时向量点积的值。
假设高维空间中两个向量 $x_{i},x_{j}$ 的内积为 $I=<x_{i},x_{j}>$,映射之后高维空间中的内积为 $I’=<\Phi(x_{i}),\Phi(x_{j})>$,尝试找到一个函数使得 **低维空间的向量 $x_{i},x_{j}$ 的运算结果为 $K(x_{i},x_{j})=I’$**,其中 $K(x,y)$ 即为核函数。
明确了以上三个问题,核函数的引入动机和作用方式也就很清楚了。
常用核函数
| 名称 | 表达式 | 参数 | 优势 | - |
| 线性核 | $\kappa(x_{i},x_{j})=x_{i}^{T}x_{j}$ | - | ||
| 多项式核 | $\kappa(x_{i},x_{j})=(x_{i}^{T}x_{j})^d$ | $d(\ge 1)$,为多项式的次数 | 较线性核而言,可解决非线性问题 | |
| 高斯核 | $\kappa(x_{i},x_{j})=\exp(-\frac{||x_{i}-x_{j}||^{2}}{2\sigma^{2}})$ | $\sigma(> 0)$,为高斯核的带宽 | 可映射到无限维 | |
| 指数核 | $\kappa(x_{i},x_{j})=\exp(-\frac{||x_{i}-x_{j}||}{2\sigma^{2}})$ | $\sigma(> 0)$ | 调整向量距离为 $L1$ 距离,对参数的依赖性降低 | |
| 拉普拉斯核 | $\kappa(x_{i},x_{j})=\exp(-\frac{||x_{i}-x_{j}||}{\sigma})$ | $\sigma(> 0)$ | 基本等价于指数核,对参数的敏感性更低 | |
| Sigmoid核 | $\kappa(x_{i},x_{j})=\tanh(\beta x_{i}^{T}x_{j}+\theta)$ | $\tanh$ 为双曲正切函数,$\beta > 0, \theta < 0$ | - |
软间隔和正则化
软间隔:允许某些样本不满足约束 $y_{i}(w^{T}x_{i}+b) \ge 1$。
优化目标的改进
在 最大化间隔的同时,使得不满足约束的样本尽可能少,优化目标写成:$$\min_{w,b} \frac{1}{2}||w||^{2}+C \sum_{i=1}^{m}\mathcal{L}(z),$$ 以上问题可称为正则化问题,其中 $C$ 为惩罚系数,$C$ 越大,上式会迫使更多的样本满足约束,反之更少。
软间隔SVM的欠拟合和过拟合解决办法?
解析:欠拟合-增大 $C$,过拟合-减小 $C$。
SVM的优劣势
SVM的优点:
(1)解决了 小样本情况下 的机器学习分类问题。
(2)由于使用核函数方法 克服了维数灾难和非线性可分的问题,所以向高维空间映射时没有增加计算的复杂度。(由于支持向量机算法的最终决策函数只由少数的支持向量所确定,所以计算的复杂性取决于支持向量的数目,而不是整个样本空间的维数)。
SVM的缺点:
(1)支持向量机算法对大规模训练样本难以实施,这是因为支持向量算法借助二次规划求解支持向量,这其中会设计 $m$ 阶矩阵的计算,所以 矩阵阶数很大时将耗费大量的机器内存和运算时间。
(2)经典的SVM只给出二分类的算法,而在数据挖掘中,一般要解决多分类的分类问题,而支持向量机 对于多分类问题解决效果并不理想。
(3)现在常用的SVM理论都是使用 **固定惩罚系数 $C$**,但是正负样本的两种错误造成的损失是不一样的。
一些问题
神经网络
感知机
BP神经网络
深度学习
聚类
原型聚类
K-Means
算法步骤:
假设样本总数为N,K-means聚类法可以简单表示为一下几个步骤:
(1)在样本中随机选取K个点,作为每一类的中心点。
(2)计算剩下n-K个样本点到每个聚类中心的距离(距离有很多种,假设这里采用欧式距离)。对于每一个样本点,将它归到和他距离最近的聚类中心所属的类。
(3)将每一个类内的所有点取平均值,计算出新的聚类中心。
(4)重复步骤2和3的操作,直到所有的聚类中心不再改变。
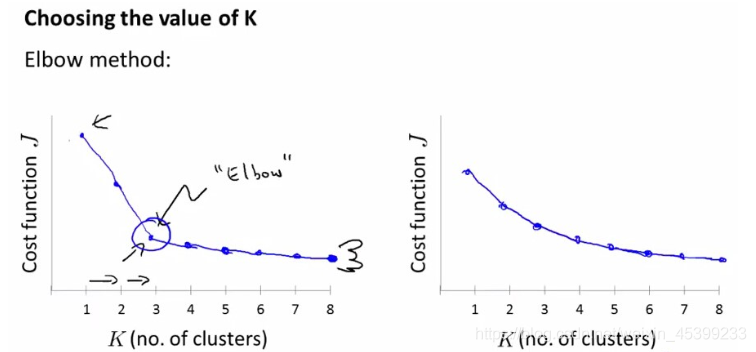
K值的选择?
(1)拍脑袋法:$K \approx \sqrt{n/2}$
(2)肘部法则:纵坐标cost一般可以定义为Sum of the Squared Srrors(SSE),$SSE=\sum_{p \in C_{i}}|p-m_{i}|^{2}$,其中 $C_{i}$ 代表第 $i$ 个簇,$p$ 是簇 $C_{i}$ 里的样本点,$m_{i}$ 是簇的中心。如下左图为一个比较完美的肘部图,但不是所有的问题都能画出这样的图,因此对于 右图无法确认的情况则需要借助其他的方法。
(3)轮廓系数法:定义样本点 $X_{i}$ 的轮廓系数(Silhouette Coefficient)为 $$S_{i}=\frac{b(i)-a(i)}{max(a(i),b(i))}=\begin{cases} 1-\frac{a_{i}}{b_{i}}, a_{i}<b_{i}, \\ 0, a_{i}=b_{i}, \\ \frac{b_{i}}{a_{i}}-1, a_{i}>b_{i}, \end{cases}$$ 易知 $S_{i} \in [-1,1]$,其中 $a_{i}$ 是 $X_{i}$ 和同簇的其他样本的平均距离,称为 簇内差异度。 $b_{i}$ 是 $X_{i}$ 和最近簇中所有样本的平均距离,称为 簇间差异度。 由上式可知:
i)若 $a_{i}<b_{i}$,则 $S_{i} \rightarrow 1$,表示簇内相似度足够高,样本 $X_{i}$ 的聚类结果合理;
**ii)**若 $a_{i}>b_{i}$,则 $S_{i} \rightarrow -1$,表示簇内相似度不足,样本 $X_{i}$ 应该聚类到另外的簇。
iii)若 $a_{i}=b_{i}$,则 $S_{i} \approx 0$,说明样本 $X_{i}$ 在两个簇的边界上。
1 | |
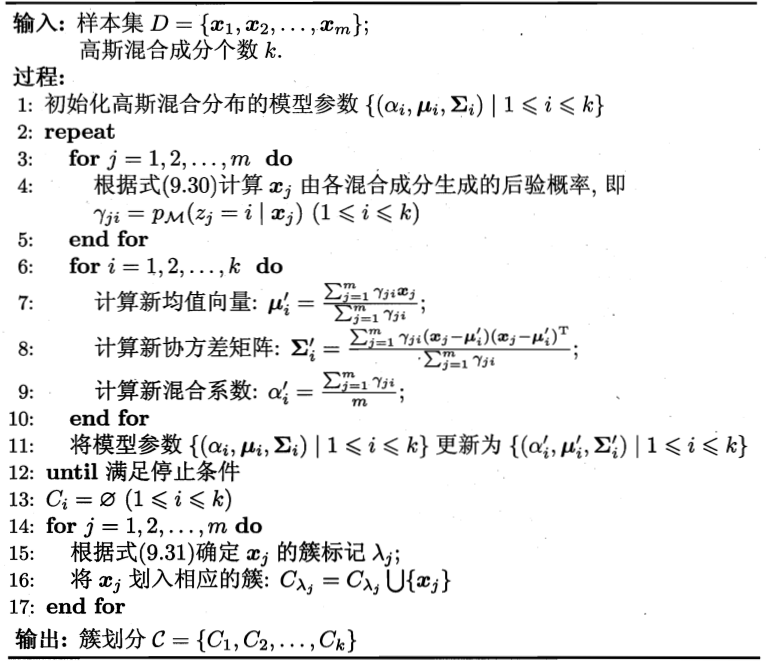
高斯混合模型(GMM)
降维
线性判别分析(LDA)
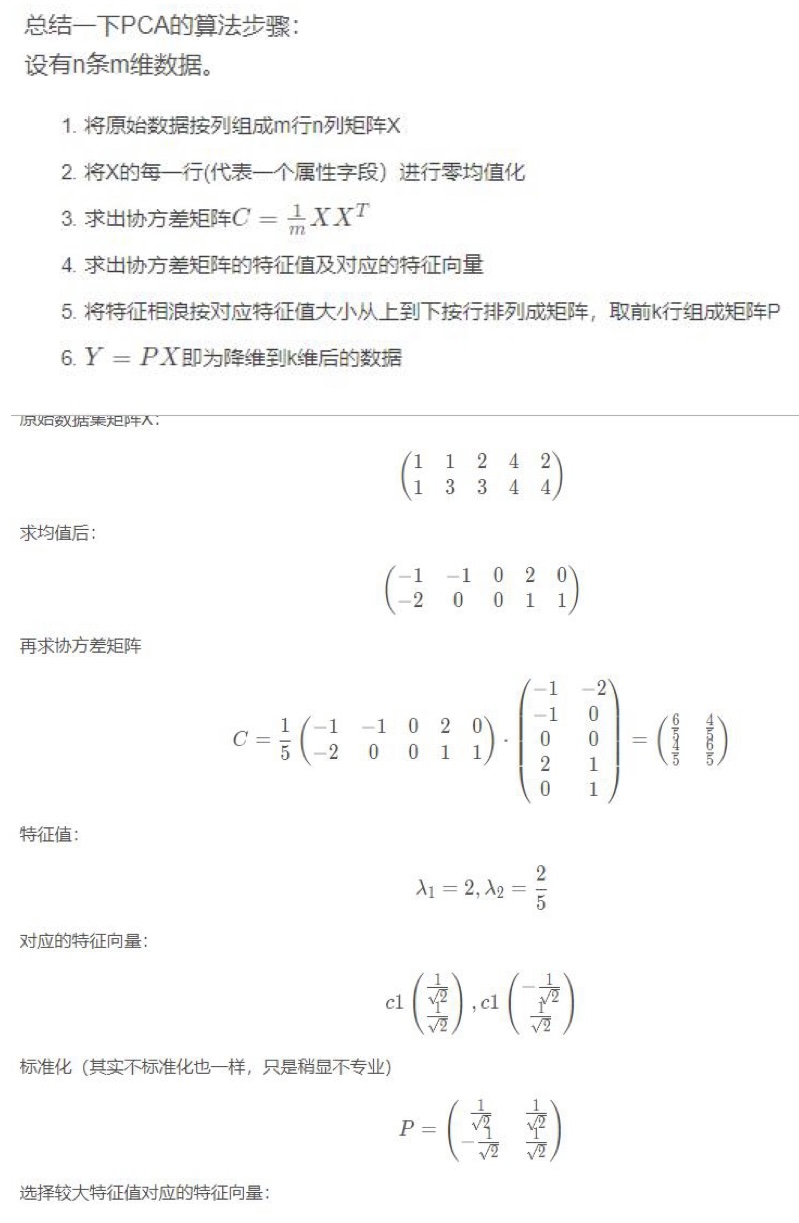
主成分分析(PCA)
Principal Component Analysis, PCA
通俗易懂的描述:将数据投影到方差最大(方差越大,信息量越多)的几个相互正交(线性无关)的方向上。